ชุดการเรียนรู้การควบคุมการเคลื่อนที่ของวัตถุบนสายพานลำเลียงแบบลาดเอียง
Article Sidebar
Main Article Content
บทคัดย่อ
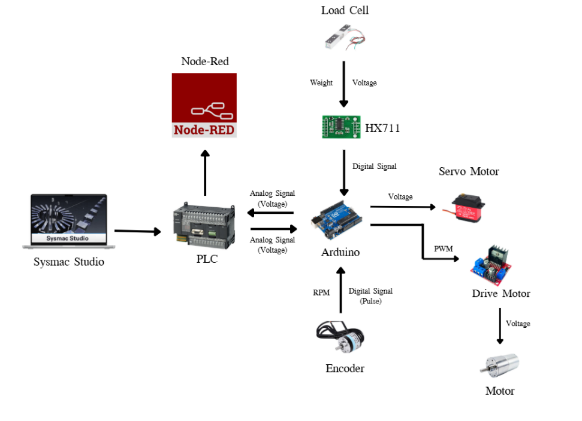
การศึกษาครั้งนี้ได้พัฒนาชุดการเรียนรู้การควบคุมการเคลื่อนที่บนสายพานลำเลียงแบบลาดเอียง โดยได้จำลองการแก้ปัญหาในภาคอุตสาหกรรมมีการใช้งานสายพานลำเลียงหลายประเภท แต่การขนย้ายวัสดุระหว่างระดับความสูงที่แตกต่างกันยังต้องอาศัยการควบคุมที่มีประสิทธิภาพเพื่อลดการสูญเสียและเพิ่มความแม่นยำ ในกระบวนการเรียนการสอนด้านการควบคุมการเคลื่อนที่และตำแหน่งจำเป็นต้องมีสื่อการสอนที่ช่วยให้นักศึกษาได้เรียนรู้จากสถานการณ์จริงมากขึ้น ดังนั้น การศึกษาครั้งนี้จึงมีวัตถุประสงค์หลัก คือ 1) เพื่อพัฒนาชุดการเรียนรู้การควบคุมการเคลื่อนที่ของวัตถุบนสายพานลำเลียงแบบลาดเอียง 2) เพื่อประเมินผลสัมฤทธิ์ในการเรียนรู้ของผู้เรียนโดยมีชุดการเรียนรู้การควบคุมการเคลื่อนที่ของวัตถุบนสายพานลำเลียงแบบลาดเอียงในการเรียนรู้ 3) เพื่อประเมินการมีส่วนร่วมของผู้เรียนในการเรียนรู้รายวิชาควบคุมการเคลื่อนที่และตำแหน่งโดยมีชุดการเรียนรู้การควบคุมการเคลื่อนที่ของวัตถุบนสายพานลำเลียงแบบลาดเอียงในการเรียนรู้ ขอบเขตของการศึกษาครอบคลุมการออกแบบและสร้างต้นแบบชุดการเรียนรู้ การทดสอบการทำงานของเซนเซอร์และระบบควบคุม รวมถึงการประเมินผลการใช้งานจริงในชั้นเรียน โดยเป้าหมาย คือ นักศึกษาระดับปริญญาตรี สาขาวิชาวิศวกรรมเเมคคาทรอนิกส์และหุ่นยนต์ จำนวน 36 คน ผลการศึกษาพบว่า ชุดการเรียนรู้ที่พัฒนาขึ้นสามารถใช้งานได้จริงในห้องเรียน ช่วยให้นักศึกษาเข้าใจหลักการควบคุมความเร็วและการประยุกต์ใช้การควบคุมแบบพีไอดีได้อย่างมีประสิทธิภาพ ผู้เรียนมีส่วนร่วมในการปฏิบัติกิจกรรมทำให้เกิดการเรียนรู้ในเชิงบวก
