Simulating Robotic Kinematics for Learning: A Game Engine Approach
Article Sidebar
Main Article Content
บทคัดย่อ
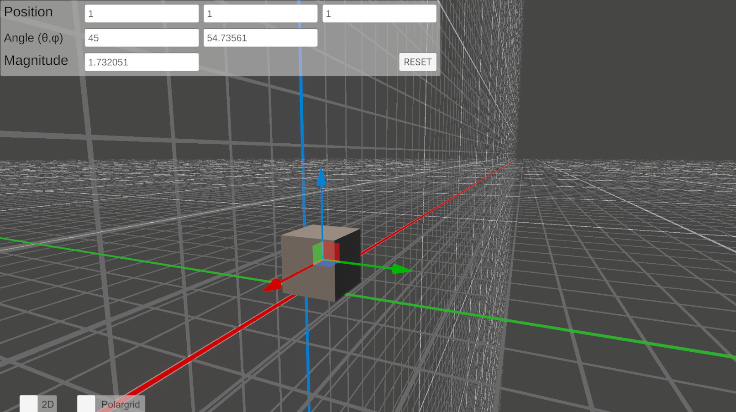
Teaching robotic kinematics presents significant challenges due to the abstract mathematical concepts involved and students' difficulty in visualizing three-dimensional movements. Traditional teaching methods often fail to provide adequate connections between theoretical principles and practical applications. This study demonstrates the development and evaluation of a Unity-based simulation tool designed to enhance robotic kinematics education through interactive visual learning. The simulation includes four modules: coordinate systems, basic kinematics, the modified Denavit-Hartenberg matrix, and PID control. Performance analysis confirmed the tool's efficiency on standard hardware, while educational effectiveness was assessed using the Instructional Materials Motivation Survey (IMMS) with control (n=31) and experimental (n=33) groups. Results revealed statistically significant improvements in Attention (p<.001, Cohen's d=0.659) and Satisfaction (p<.001, Cohen's d=0.749) dimensions for students using the simulation. Qualitative feedback highlighted the tool's effectiveness in visualizing complex concepts and bridging the gap between abstract equations and real-world applications. Users suggested improvements in the interface design and the addition of guided tutorials. This research demonstrates that game engine-based simulations can meaningfully enhance motivation and engagement in robotics education, particularly through improved conceptual visualization and interactive exploration.
